
Been making lots of progress. I can now get 14fps reliably from the server. I take the data in as raw 565 then convert it to jpg in the java server from there I send it to a c# client. So once I get the video feed from the robot it should be fairly efficient and fast. The client/server can easily meet the desired (initial) output of 10fps.
Now I’m using random data as a basis for rgb video values, but I’ve also tested with a raw byte array.
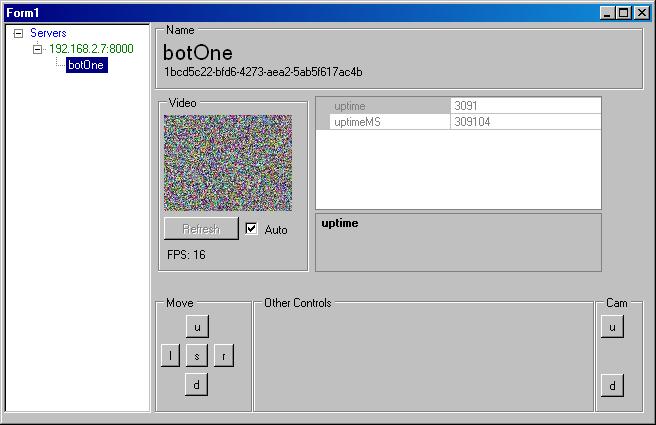
So a few more additions to the client and I will be ready to go back into the camera/bot portion. The system is designed in such a way that you could have multiple servers and multiple robots. You simply double click one to view/control it. The setting up of the subscriptions and all of that took quite a bit of time.
